export des données du nuage de points depuis Measure 10 et import dans SolidWorks

Étapes rapides
Voici tout ce que vous avez à faire.
- Collectez les données de nuage de points et enregistrez-les dans Measure 10.
- Exportez les données de nuage de points depuis Measure 10 en tant que maillage dans un fichier STL.
- Ouvrez et enregistrez le fichier STL dans SolidWorks.
Présentation
Les données de nuage de points collectées avec un ScanArm FARO peuvent être exportées depuis Measure 10 et importées dans SolidWorks. Le format du fichier d’export est STL, qui s’importe aussi facilement que l’ouverture du fichier STL dans SolidWorks. Une fois le fichier ouvert, vous pouvez utiliser l’assistant de préparation du maillage pour créer un maillage 3D avancé du nuage de points.
Détails
Commencez par collecter les données du nuage de points en utilisant le Bras et la LLP, puis enregistrez les nuages de points suivant les besoins. Les Manuels d'utilisation pour FaroArm, ScanArm et Gage vous indiquent la procédure.
Dans Measure 10
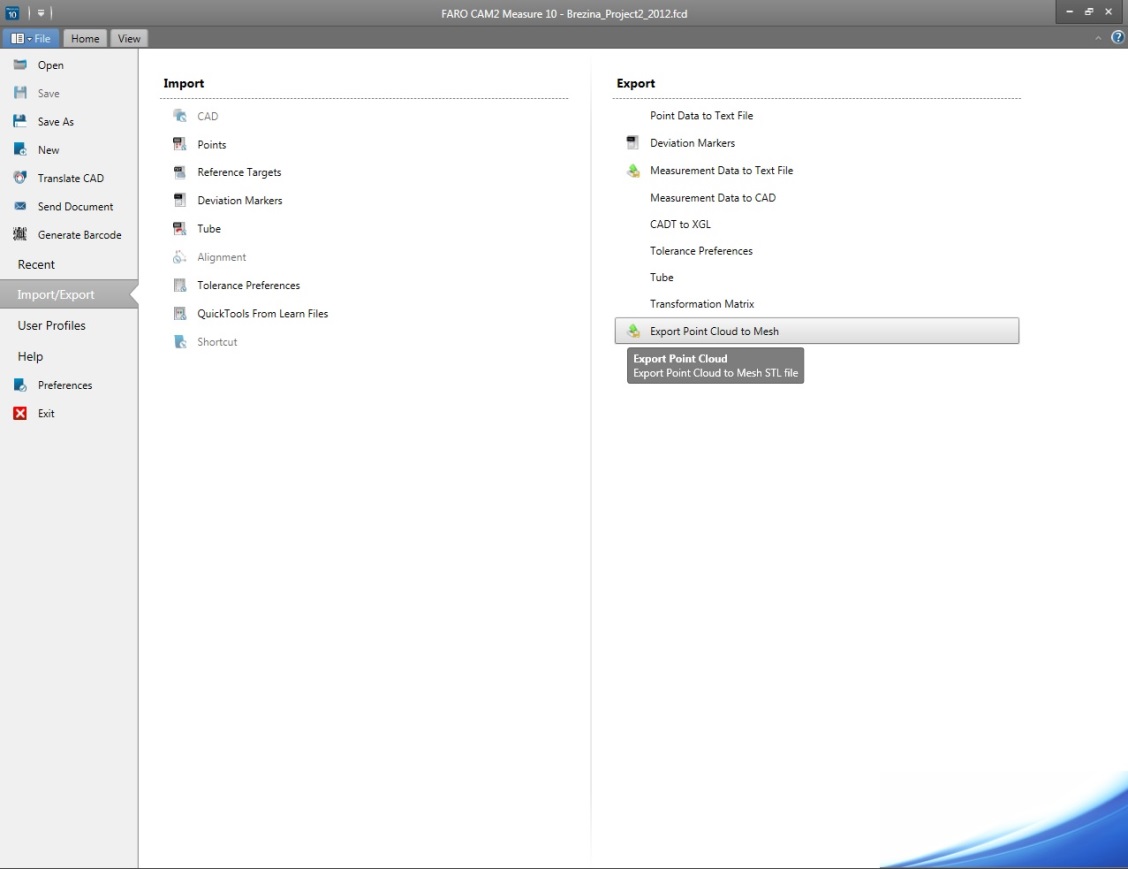
- Cliquez sur Fichier >Importer/exporter.
- Dans la section Export, cliquez sur Exporter le nuage de points en intégration (=sous forme de maillage).
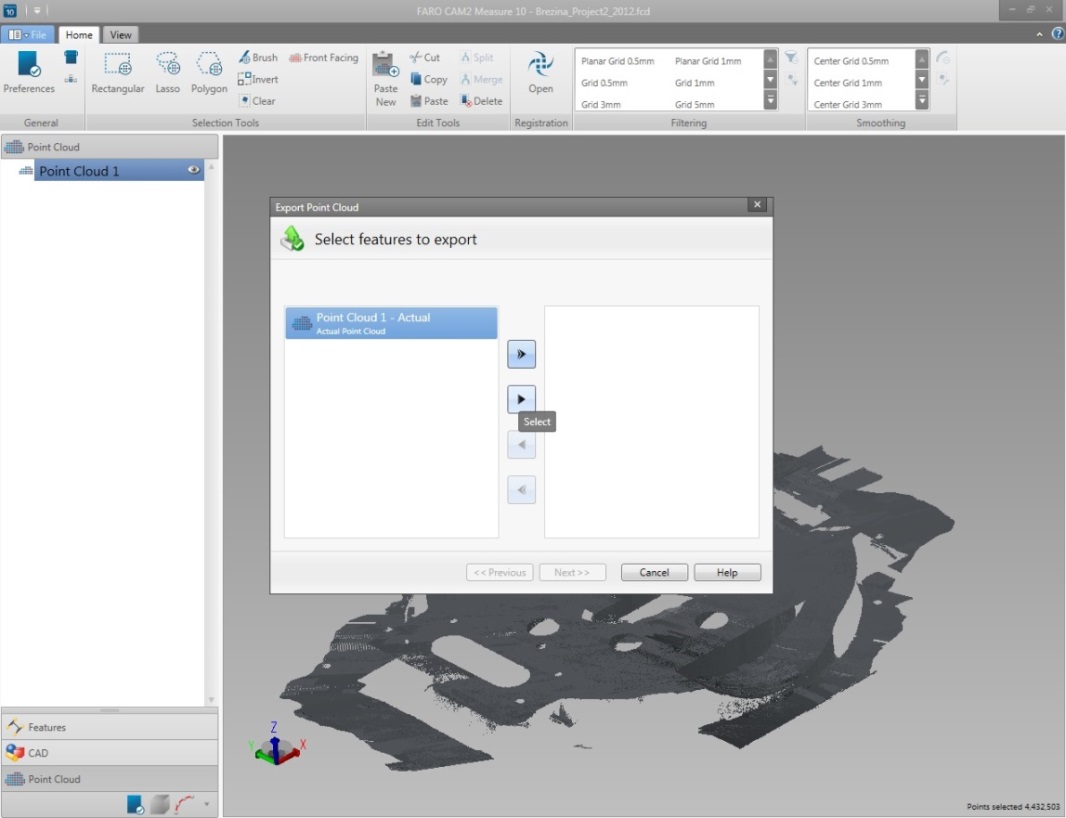
- Sélectionnez les nuages de points que vous souhaitez exporter, puis cliquez sur Suivant.
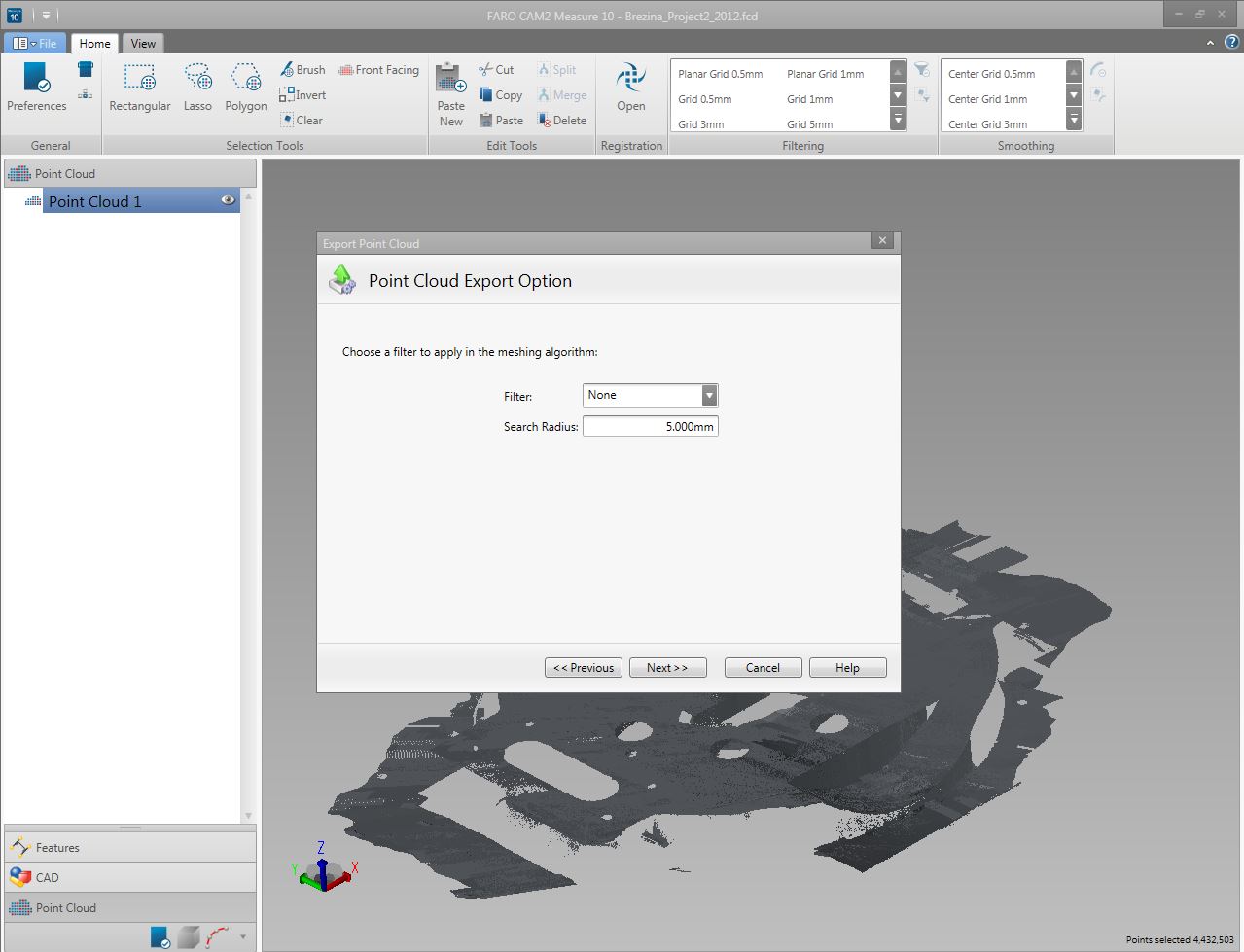
- Appliquez des filtres si cela est approprié pour votre projet. Indiquez où enregistrer le fichier exporté et cliquez sur Terminer. L’export du fichier peut prendre un certain temps suivant la taille du fichier de nuage de points.
Dans SolidWorks
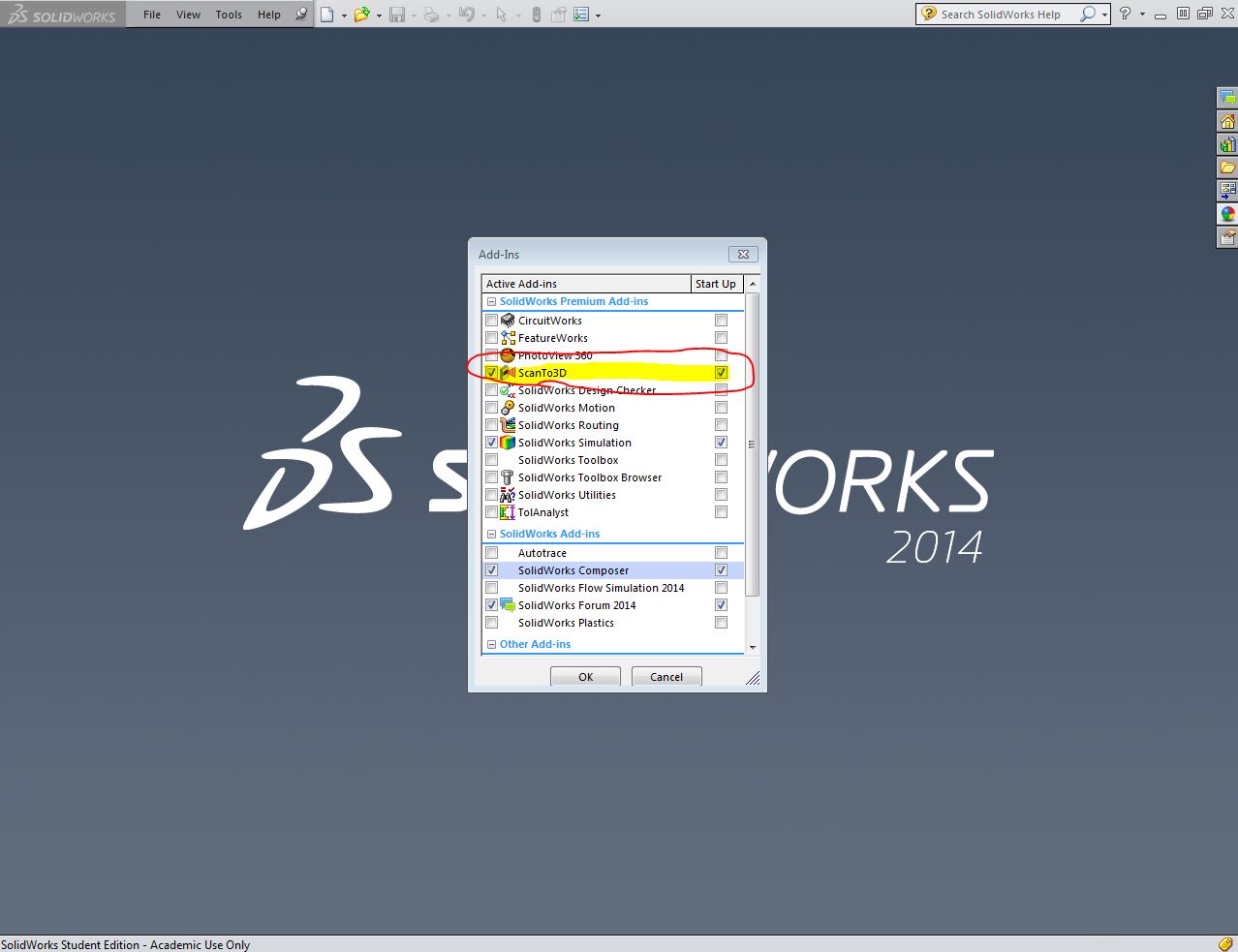
- Ouvrez SolidWorks et cliquez sur Outils> Supplément.
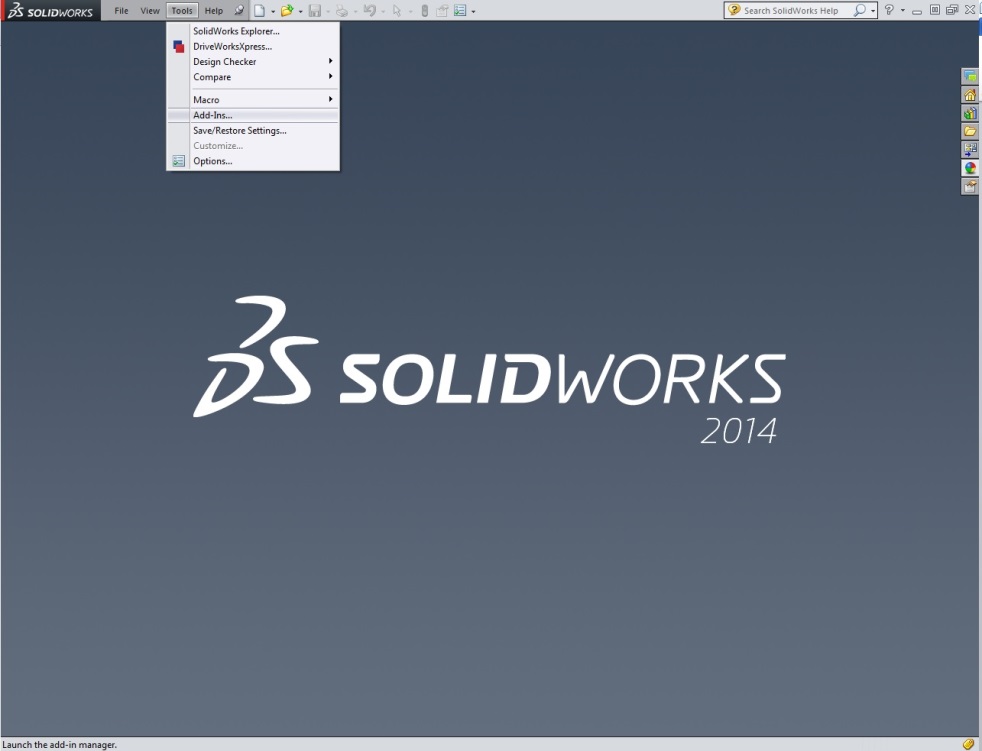
- Dans la section Suppléments actifs, cochez Scanto3D. Ce paramètre peut être différent suivant votre version de SolidWorks.
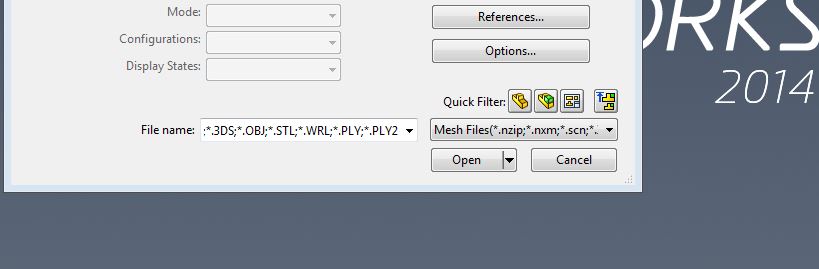
- Dans le menu principal, cliquez sur Fichier >Ouvrir.
- Dans la fenêtre d’ouverture de fichier, utilisez le menu déroulant pour le type de fichier et sélectionner Fichiers de maillage. Naviguez jusqu’à l’endroit où vous avez stocké le fichier STL exporté à partir de Measure 10 et cliquez sur Ouvrir. Le fichier STL s’ouvre à l’intérieur de SolidWorks.
- Enregistrez le fichier et utilisez l’Assistant de préparation de maillage pour configurer un maillage. Pour plus d’informations sur l’utilisation de l’Assistant de préparation de maillage, consultez la page d’assistance de SolidWorks.
Voir également
- Où puis-je télécharger les fichiers de traduction CAO de Measure 10 ou Measure Q premium (versions les plus récentes et antérieures) ?
- Où puis-je trouver les options d’import et d’export des fichiers IGES depuis Measure et SolidWorks ?
Mots-clés :
formats de fichiers d’import, formats de fichiers d’export, partage de fichiers, traducteurs CAO, fichiers CAO, fichiers CAO 3D