scan de surfaces de pièces complexes avec le Laser Line Probe (LLP) ou le ScanArm

Aperçu
Vous obtenez des résultats de haute qualité cohérents et travaillez le plus efficacement lorsque vous utilisez les meilleures pratiques pour scanner des surfaces de pièces complexes avec le Palpeur à rayon laser (LLP) ou le FARO ScanArm. Avant de commencer votre projet, regardez la vidéo et la liste ci-dessous pour avoir des conseils éprouvés qui permettent d’obtenir un scan sans contact infaillible.
Vidéo
Dans cette vidéo, regardez comment les meilleures pratiques sont appliquées. Prêtez attention à la façon dont il manipule la LLP et dont il positionne son corps pour obtenir les résultats les plus précis.
meilleures pratiques
- Inclinez la LLPcorrectement en fonction du type de surface que vous scannez.
- Pour les surfaces non réfléchissantes ou mates, l’angle du faisceau laser doit être perpendiculaire à la surface de la pièce. Cela permet à la caméra d’obtenir le plus de retour du laser.

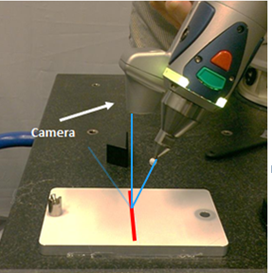
- Pour les surfaces réfléchissantes, l’angle du faisceau laser doit être en biais par rapport à la surface de la pièce. Trouvez l’angle optimal en alignant la caméra perpendiculairement à la surface de la pièce. Cela garantit que les reflets indésirables sont projetés loin de la caméra.
- Pour les surfaces non réfléchissantes ou mates, l’angle du faisceau laser doit être perpendiculaire à la surface de la pièce. Cela permet à la caméra d’obtenir le plus de retour du laser.
- Lors de l’étalonnage de la V3 ou ES du LLP, commencez par l’algorithme normal, puis ajustez les paramètres avancés pour qu’ils correspondent à la finition de la surface.
- Le réglage normal est bon pour les surfaces mates qui ne sont pas trop sombres. L’exposition s’ajuste automatiquement dans une plage de 0 à 50.
- Plein convient aux surfaces mates plus foncées. L’exposition s’ajuste automatiquement dans une plage de 0 à maximum.
- Très réfléchissant convient aux surfaces réfléchissantes. L’exposition s’ajuste automatiquement dans une plage de 0 à maximum, et ajuste également d’autres paramètres pour mieux gérer l’éclat.
- Lors de l’étalonnage du HD LLP, commencez par l’algorithme automatique-normal, puis ajustez les paramètres et les filtres pour qu’ils correspondent à la finition de la surface.
- Le filtre de réflexion supprime le bruit des données créé par les surfaces brillantes.
- L’algorithme automatique-HDR normalise les zones avec des contrastes élevés entre les zones sombres et claires
-
Numérisez en exposition fixe si les conditions d'éclairage de la pièce affectent de manière significative la qualité de votre numérisation. La numérisation en exposition fixe au lieu de la numérisation « normale » garantit la cohérence de la qualité des données si l'éclairage extérieur perturbe le capteur de la caméra. L'utilisateur peut commencer à 400 ms et ajuster l'exposition en fonction de la luminosité ou de l'obscurité de la surface de la pièce.
-
Maintenez la LLPà une distance constante de la surface de la pièce pendant que vous déplacez la LLP sur la pièce pour réduire le bruit. La LLP a une densité de point plus serrée dans le champ proche, lorsque vous maintenez la LLPà proximité, que dans le champ lointain, lorsque vous maintenez la LLP plus loin. Le bruit accru dans le champ lointain est lié à la distance que le faisceau laser doit parcourir pour faire un aller-retour entre la caméra et la surface. Lorsque le faisceau laser va plus loin, le signal de retour n’est pas aussi défini que quand il est près. C’est semblable au faisceau d’une lampe de poche. Lorsque vous projetez le faisceau de près, la lumière semble plus forte et les bords du faisceau sont mieux définis. Lorsque vous projetez le faisceau de loin, la lumière semble moins forte et les bords du faisceau sont plus diffus.
- Réglez le mode de précision sur élevé dans la boîte de dialogue Paramètres. Ce réglage filtre les points situés plus loin du scanner dans le champ lointain. Bien que cela réduise la profondeur de champ d’environ 4,5 pouces (115 mm) à 1,25 pouce (32 mm), les essais sur des surfaces étalonnées avec une finition mate montrent que le bruit du scan est réduit d’environ 50 %. La sélection du mode haute précision pour les modèles V1, V2, V3 et ES peut augmenter la précision, mais pour le HD, il ne fera que diminuer le bruit significativement.
- Tenez la poignée fermement pendant que vous déplacez la LLP sur les surfaces de pièce. Évitez de la faire tourner.
- Positionnez les surfaces des pièces plus près de la LLP plutôt que plus loin.
- scannez une surface adjacente puis l’autre lors du scan de surfaces qui se rencontrent dans un coin. Positionnez d’abord la LLP perpendiculairement à une surface, faites un scan complet et arrêtez. Ensuite, repositionnez la LLP perpendiculairement à la surface adjacente, faites un scan complet et arrêtez. Ne déplacez pas la LLP en survolant le coin des deux surfaces adjacentes.
- Ne vous penchez pas trop en avant lors du scan. Positionnez votre propre corps, bras et mains, de telle sorte que la section de la pièce que vous scannez reste confortablement à votre portée et convienne à la position de votre corps.
- Divisez votre projet de scan laser en parties logiques qui vous permettent d’observer les meilleures pratiques lors du scan.
Voir également
- Quels paramètres puis-je changer pour obtenir une qualité optimale avec le Palpeur à rayon laser (LLP) ?
- Quelle poudre de pulvérisation réduit les réflexions sur les surfaces brillantes lors du scan avec le FARO ScanArm ou Palpeur à rayon laser (LLP) ?
Mots-clés :
scanner des coins, scanner des pièces complexes, scanner des pièces difficiles, manipuler la LLP, orienter la LLP, position normale pour la LLP